(1) 水下無人載具(ROV):ROV是一種遠程操控的水下載具,通常被用於執行需要人類無法直接進入的水下任務。ROV可以配備各種儀器和感測器,以執行不同的任務,如海床勘查、管道檢查、水下建設工程等。

圖 1、水下無人載具(Deep Trekker DTG3)
(2) 水下精密定位:水下精密定位是確定ROV位置和方向的關鍵技術,它可以使用不同的方式,包括聲波定位、GPS、慣性導航和其他感測技術。基於短基線(SBL)聲波進行定位,這是一種常見的方法之一。
(3) U1定位器:U1定位器為本中心使用之水下精密定位設備之一。它可以使用聲波信號進行位置測量,通常會與其他元件結合使用,如天線/接收器、基線和水面上儀器箱等。

圖 2、U1定位器
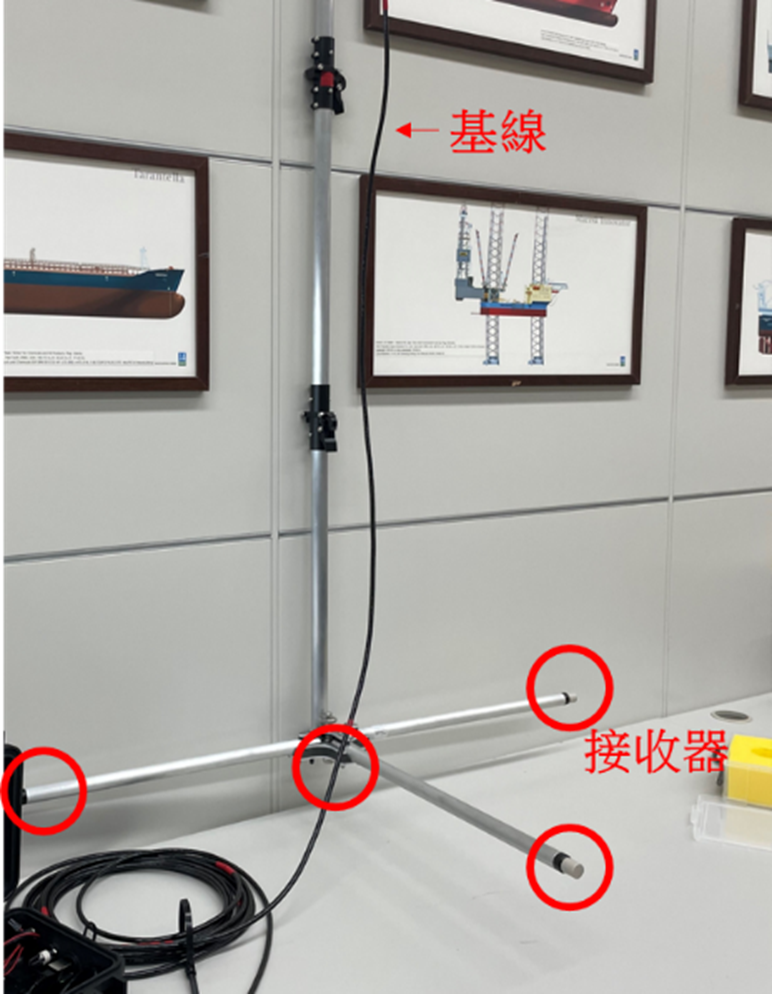
圖 3、天線裝載基線與D1接收器

圖 4、水面上儀器箱(G2)
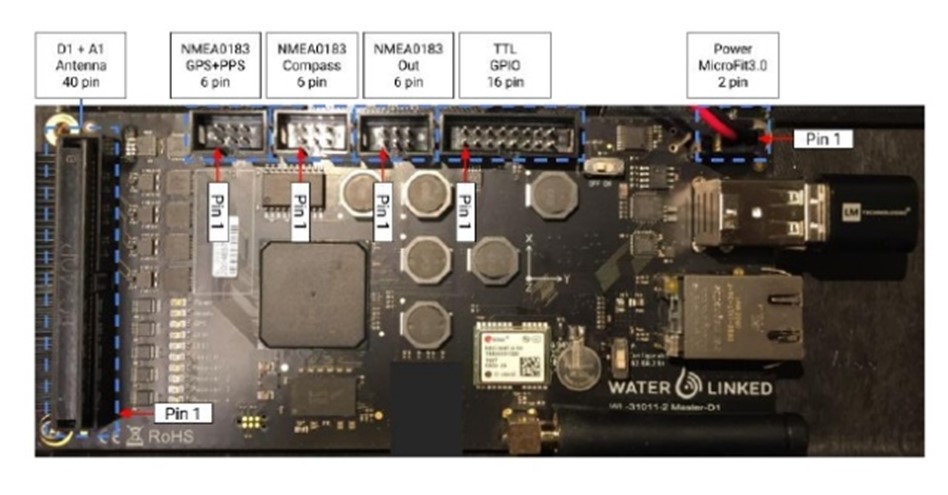
圖 5、水面上儀器箱內部照
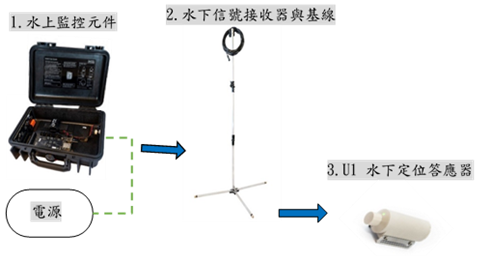
圖 6、設備架構圖
(4) 裝備和感測器:ROV通常配備多種感測器,例如深度感測器、羅盤、照明燈等,這些感測器用於確定ROV的位置、姿勢和周圍環境的條件。此外,ROV也可配備鏡頭,以提供視覺訊息。
(5) 實時動態技術(RTK)基地站:RTK是一種全球定位系統,用於提供高精度的位置訊息。水下ROV可以利用RTK技術來提高其定位的精度。RTK基地站通常會與ROV的移動站進行通信,以確保定位的準確性。
(6) 應用程式介面(API):本套系統具API,允許不同的設備和軟體之間進行數據交換和通信。API可以用來將RTK或其他位置數據傳送到水下ROV中,從而實現更準確的水下定位和量測。
總體來說水下ROV的發展和應用不斷增長,使其在海洋科學研究、海洋工程和水下救援等領域發揮著關鍵作用。水下精密定位技術的不斷改進和整合也有助於提高ROV的性能和應用範圍。
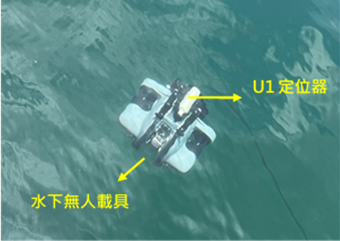
圖 7、水下無人載具搭載定位器
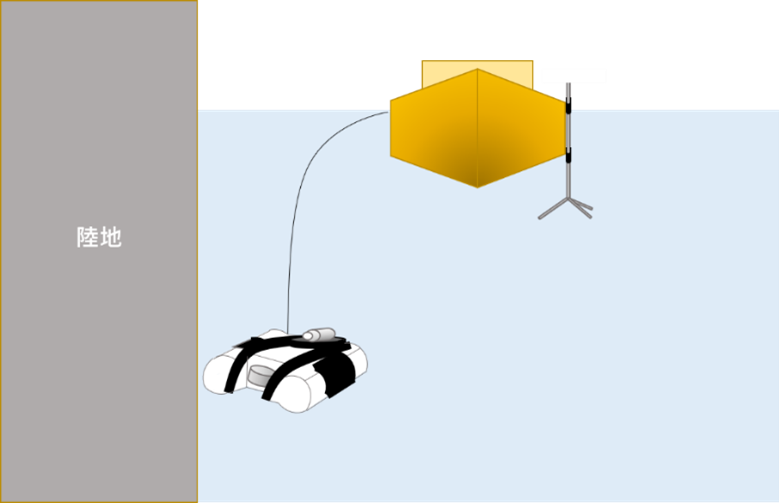
圖 8、下潛後移動示意圖