(1) Remotely Operated Vehicle (ROV): ROV is a remotely controlled underwater vehicle that is usually used to perform underwater tasks that require direct entry by humans. ROV can be equipped with various instruments and sensors to perform different tasks, such as seabed surveys, pipeline inspection, underwater construction projects, etc.

Figure 1. Remotely operated vehicle (Deep Trekker DTG3)
(2) High-precision underwater positioning: High-precision underwater positioning is a key technology to determine the position and direction of ROV. It can use different methods, including acoustic positioning, GPS, inertial navigation, and other sensing technologies. Positioning based on short baseline (SBL) acoustic system is one of the common methods.
(3) U1 locator: The U1 locator is one of the high-precision underwater positioning equipment used by IMRC. It uses acoustic signals to perform position measurements, often in combination with other components such as antennas, receivers, baselines, and G2 topside.

Figure 2. U1 locator
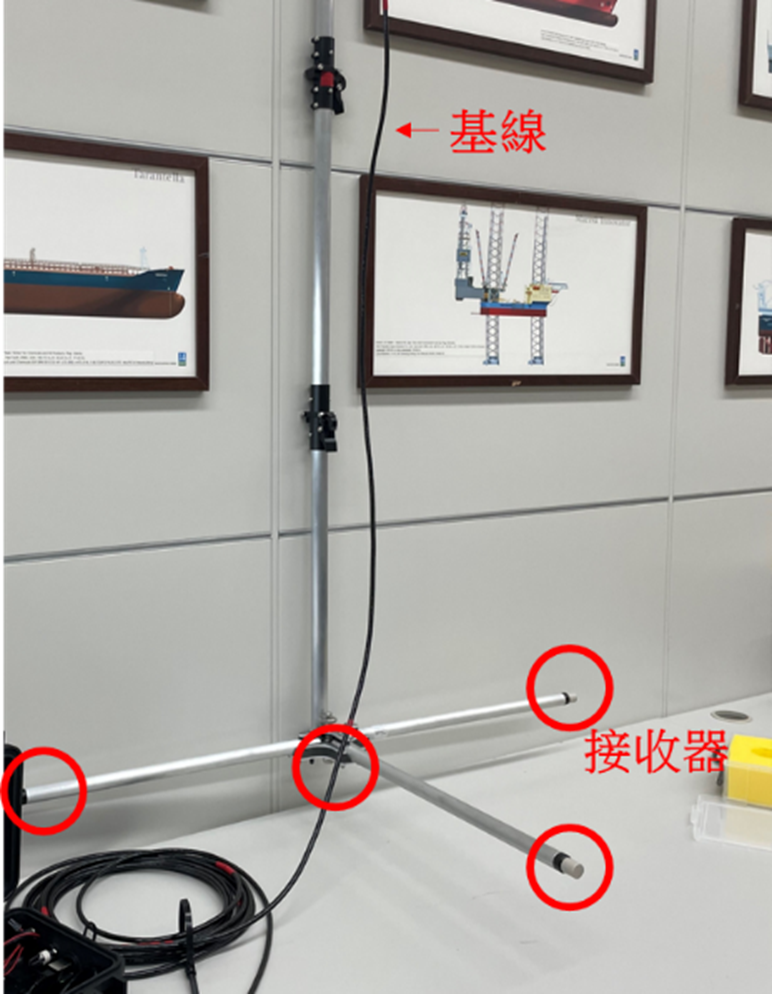
Figure 3. Antenna loading baseline with D1 receiver

Figure 4. G2 topside
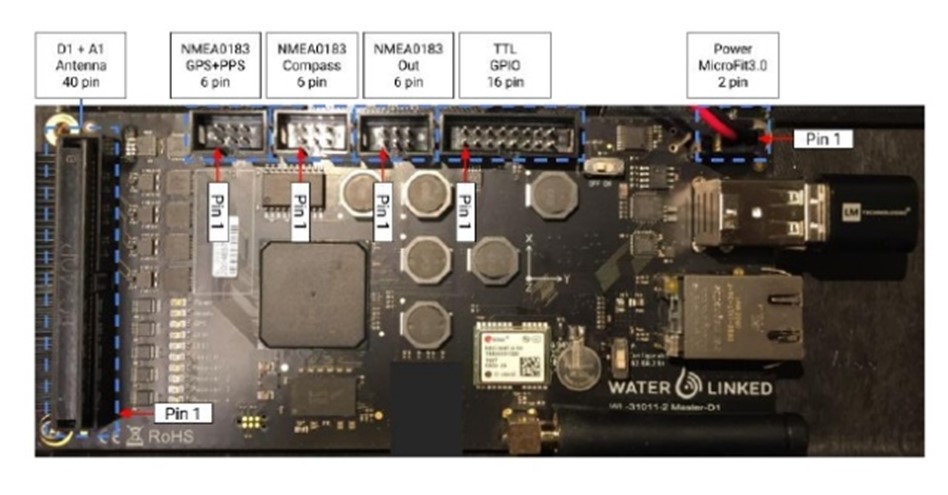
Figure 5. Inside shot of G2 topside
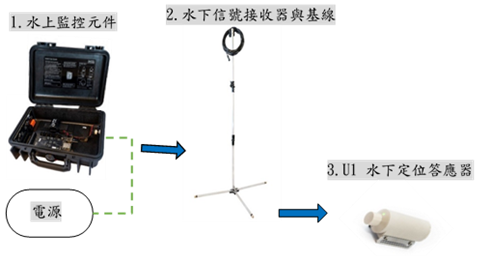
Figure 6. Device architecture diagram
(4) Equipment and sensors: ROVs are usually equipped with a variety of sensors, such as depth sensors, compasses, lights, etc. These sensors are used to determine the position, posture, and surrounding environmental conditions of the ROV. In addition, ROV can also be equipped with lenses to provide visual information.
(5) Real-time kinematic technology (RTK) base station: RTK is a global positioning system used to provide high-precision location information. Underwater ROV can use RTK technology to improve their positioning accuracy. The RTK base station usually communicates with the mobile station (here is the ROV) to ensure positioning accuracy.
(6) Application programming interface (API): This system has an API that allows data exchange and communication between different devices and software. The API can be used to transmit RTK or other position data to underwater ROV to achieve more accurate underwater positioning and measurement.
The development and application of underwater ROV continue to grow, allowing them to play a key role in the fields of marine scientific research, marine engineering, and underwater rescue. The continuous improvement and integration of high-precision underwater positioning technology also helps to improve the performance and application range of ROV.
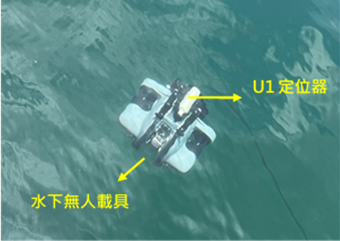
Figure 7. A ROV equipped with a positioner
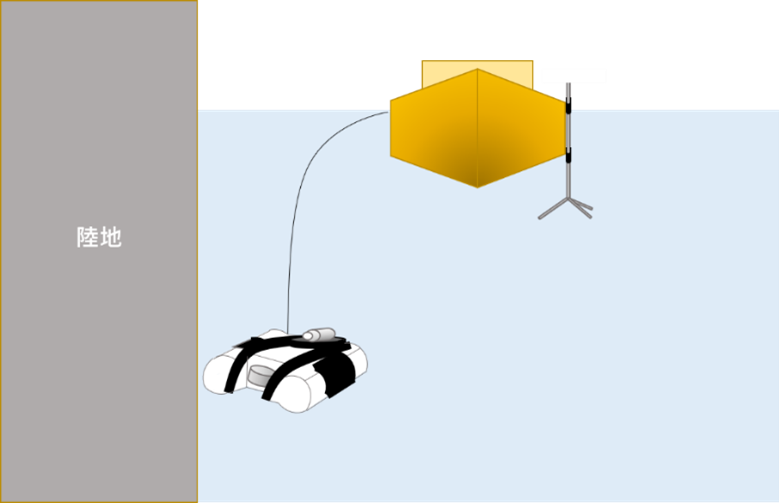
Figure 8. Schematic diagram of movement after diving
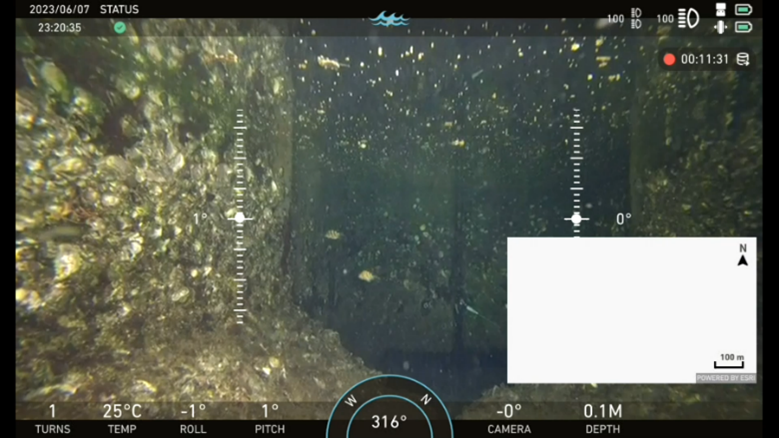
Figure 9. Underwater images and positioning test photos